
September 3, 2025
Led by researchers at Google DeepMind Robotics, and through a long-term collaboration with Intrinsic - we are unveiling advanced AI research that enables fully automated, collision-free coordination for multiple industrial robots performing tasks together
Written by Torsten Kroeger, Chief Science Officer, Intrinsic
For decades, automation experts the world over have grappled with robotic systems that are manual and complex to program, point by point, task by task. This is especially true when programming multiple robots that need to work on tasks in the same space, without colliding or slowing down. And while expert robot programmers achieve impressive results with offline programming tools and teach pendants - a person’s endurance, ability to perceive depth, deal with line of sight obstructions, and spatially translate ‘possible trajectories’ in dozens of dimensions into code, by hand - makes it a time intensive, expensive, trial-and-error process. Consider that there are around 4.3 million industrial robots installed globally today. Conservatively assuming ~24 hours on average per robot, based on a moderately complex task like spot welding, equates to more than 100,000,000 hours of manual programming time – much of it throwaway if the necessary task and layout changes, making it incredibly inflexible.
The team at Intrinsic is excited to publicly share the groundbreaking work presented in the research paper "RoboBallet: Planning for Multi-Robot Reaching with Graph Neural Networks and Reinforcement Learning", which was published in the September edition of Science Robotics. Led by Google DeepMind Robotics and through a multi-year collaboration with Intrinsic, as well as University College London, this research introduces a specialized AI model that addresses an unsolved multi-robot motion planning challenge head-on. By leveraging Reinforcement Learning to train an AI agent in the form of a Graph Neural Network on millions of synthetically-generated scenes to plan robot motion, the model learns to navigate unseen environments and processes as if it were already trained to - and it does so with incredible efficiency and speed.

0 / 0
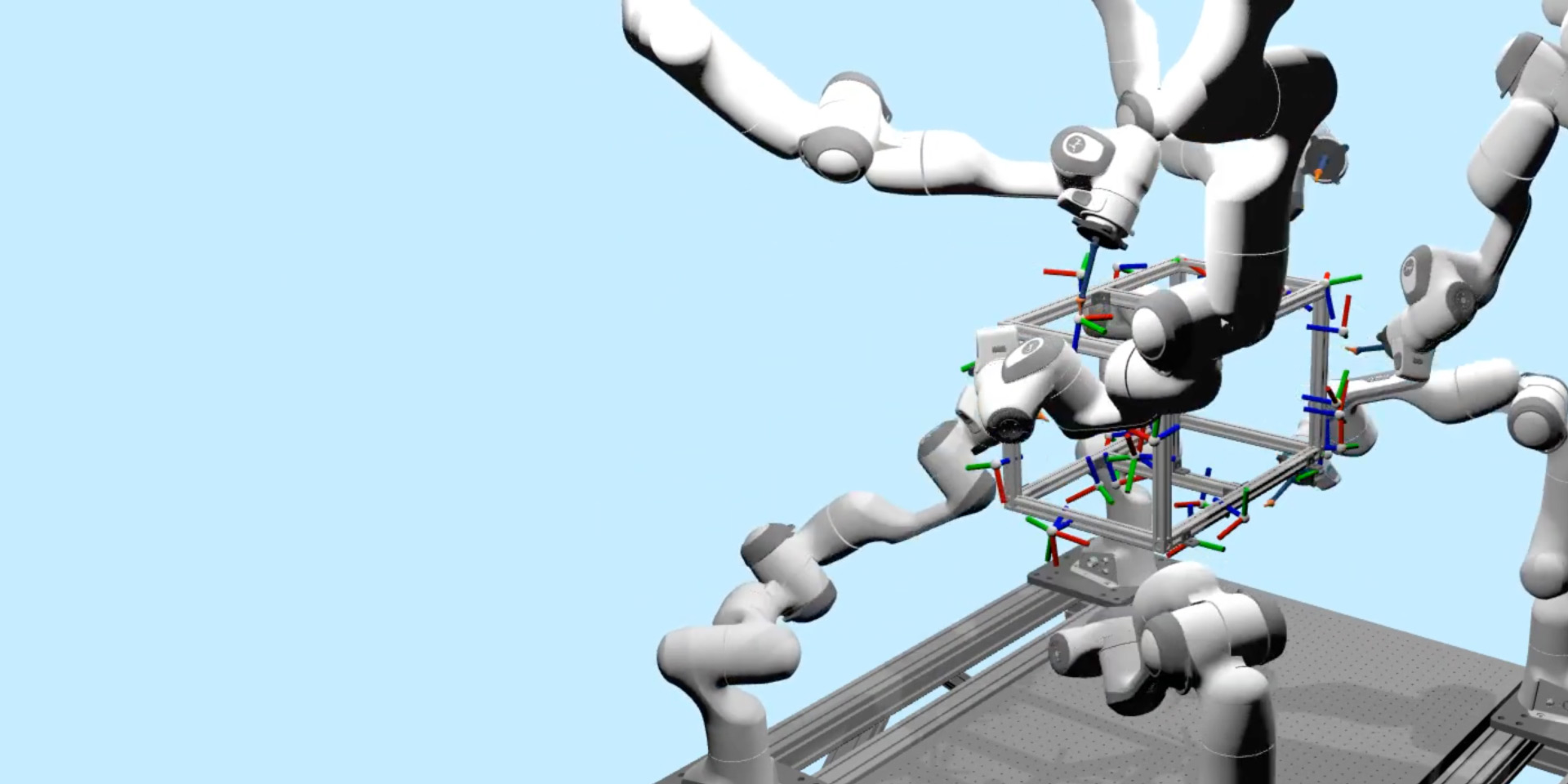
This research tackles one of the most persistent challenges in robotics: the collision-free coordination and collaboration of multiple robots performing numerous tasks in shared, complex workspaces. Historically, this has been computationally intractable for classical methods at real-world scale. While there has been great progress for robot motion planning in the last years with “rule-based” or “sampling-based” and often heuristic-based algorithms, they typically work for one or few robots at a time and require a lot of domain expertise to adjust and parameterize to be useful. The architecture of this new AI model and the corresponding reinforcement-learning approach, which trains an AI agent to find a holistically optimized solution for robot motion trajectories, enables robots to learn highly optimized paths and task sequences through trial and error, using just CAD files and minimal descriptions of the tasks. No teach pendant, no hard coding, external data, parameterizing algorithms, or manual input is needed.
“We developed an AI-based approach to solving this problem that uses a graph neural network trained using reinforcement learning, allowing, for the first time, automated task and motion planning at industrial scale with up to eight robots working together,” said lead author Matthew Lai, Research Engineer at Google DeepMind Robotics. “Our solution is able to generate high quality robot motion plans in seconds, and allows human designers to focus on more creative and application-specific aspects of workcell design, and utilizing the AI system to complete the repetitive planning portion much faster."
At the core of this model are Graph Neural Networks (GNNs), functioning as specialized models for robot motion and trajectory planning. GNNs are a type of AI model that represent complex environments as graphs, where ‘nodes’ signify entities like robots, tasks, and obstacles, and ‘graph edges’ signify knowledge of how nodes interact (often called ‘inductive biases’). It’s a powerful and scalable way to represent the complexity and relationships between objects and tasks in industrial robot workcells, where dozens of objects must be orchestrated together with incredible precision to achieve a task.
0 / 0
It generates precise, high-quality, and collision-free trajectories that are near-optimal, often outperforming traditional methods and expert-designed solutions by about 25% in lab tests. In addition, an important consideration is efficiency as more robots are added - the ability to control more robots is only meaningful if the controller is able to solve tasks faster with more robots. Lab tests showed strong results in scaling from four to eight robots, with the average time to execute tasks reducing by 60%. Consider what those efficiencies could mean for the future of multi-robot planning in industries like automotive, aviation and electronics manufacturing - where more complex tasks like welding, assembly, component testing and inspection happen in increasingly smaller spaces, with increasingly complex parts and processes. This form of “densely coordinated robotics manipulation” could revolutionize the economics of traditional robotic programming and system operations in manufacturing.
The model can be given a "bundle of tasks" to complete, and without any other instructions or interventions can autonomously generate efficient motion paths for each robot, including ‘baked in’ collision avoidance, in just a few seconds of inference. Because the model already has a detailed understanding of the relationships between nodes (robots, tasks, obstacles, parts), it can solve for ‘unseen’ scenarios just as efficiently and quickly. No supervised learning or annotations are necessary either after training, making this type of model intuitive and autonomously dynamic to use.
This new technology is a critical step towards bringing truly adaptive, hyper-efficient multi-robot models to robotics and manufacturing at large. In the future there may be no need to write traditional algorithms, manually deconflicting robot paths, or tell each robot which specific task to perform in a position-controlled way. Instead, a person will simply define the tasks and relevant boundary conditions at a high level, and the system will determine the optimal sequence, allocation of actions, and collision-free paths for all robots – irrespective of model or make – to execute the job.
When combined with other intelligent capabilities operating at the edge, like AI-enabled perception, this kind of model could enable real-time robotic replanning during runtime. A system like that could rapidly adapt to dynamic changes, such as variations in a workpiece's position or newly introduced obstacles or even failing robots, making more continuous and adaptive operations possible without halting production or downtime.
We’re proud to help pave the way for a new generation of intelligent robotic solutions that will generate new value for industry in ways that were previously too expensive, too complex or even intractable to solve with traditional methods. The Intrinsic team is excited to continue collaborating with our pioneering colleagues at Google DeepMind Robotics on all things AI and robotics.
0 / 0